
el telescopio dobsoniano motorizado de 20,4 pulgadas (51,2 cm.) f/4,8...
una exposicion sin guiado de M13 usando la cámara cookbook 245 de Richard
Berry 
Los telescopios Dobson ofrecen espejos delgados de gran tamaño con monturas estables y baratas del tipo altacimutal. Motorizar un Dobson añade capacidades de seguimiento y búsqueda de objetos.
Cuando el objeto permanece centrado en el ocular, se disfruta de una visión relajada. Además, se pueden usar más aumentos para mostrar mayor detalle. Finalmente, se puede ampliar mucho la visión del universo añadiendo una CCD o una cámara electrónica a tu telescopio Dobson que posea un gran espejo.
La rápida localización de objetos muy débiles es sencilla, gracias al desplazamiento controlado por el ordenador. Por otra parte, el control de los motores por el ordenador permite movimientos complejos del telescopio, tales como "sobrevuelos" con movimientos suaves sobre campos visuales y objetos extensos, además del seguimiento rápido de satélites.
Con una montura motorizada y controlada por ordenador se tienen varias formas de localizar un objeto. Por una parte se pueden realizar saltos estelares moviendo el telescopio a mano. Los codificadores de posición opcionales seguirán la pista al movimiento del telescopio. También se pueden usar los motores del telescopio para realizar los saltos, adoptando en este caso una aproximación no manual. Además, se puede mover el telescopio a mano o con los motores hasta que las coordenadas mostradas en la pantalla sean las del objeto buscado. Finalmente, se puede hacer que el ordenador encuentre el objeto por tí a partir de una de las muchas listas incluídas, o por medio de "Guide", un planetario para ordenador. Sin embargo, el punto más importante a tener en cuenta es que, una vez se localice el objeto, el telescopio realizará el seguimiento automáticamente, manteniéndolo centrado en el ocular.
En efecto, para mi 20 pulgadas (50,2 cm.) f/5, el campo donde la coma no excede de 1/4 de longitud de onda es excesivamente pequeño - unos cuantos diámetros de Jupiter desde el centro de colimado. Si hiciera el guiado a mano, necesitaría reorientar de forma muy precisa el telescopio cada pocos segundos.
Puesto que la velocidad de guiado varía constantemente en un telescopio altacimutal, se necesita un microprocesador, esto es, un PC (ya sea portatil o no) para controlar los motores. El programa, por medio del puerto paralelo del PC, controla directamente la forma de onda de la corriente que se aplica a cada bobinado del motor, consiguiéndose un controlador barato y de gran versatilidad. Los motores paso a paso están preparados para realizar un seguimiento suave por medio de micropasos, y para desplazar el telescopio a gran velocidad por medio de medios pasos con sobrevoltaje.
Si tu tienes un PC con procesador 80286 a 16 MHz como mínimo, ya sea portátil o no, se puede modificar una montura Dobson para usar este método de control por poco dinero. Cada eje precisa de un motor paso a paso, cuyo coste es de unos $30 (alrededor de 5.000 ptas). La electrónica suma unos pocos dólares más (unas 5.000 ptas.).
Se pueden conectar codificadores opcionales al programa de control. Esto permite una actualización automática de coordenadas cuando se desplaza el telescopio a mano, además de permitir un centrado automático del objeto cuando el telescopio se mueve de forma accidental debido a algún empujón imprevisto.
Una nota sobre la rotación de campo: ésta se incluye de forma opcional en el proyecto, sin embargo sólo es necesaria para astrofotografía de larga exposición. Para la mayor parte del cielo, se pueden tomar imágenes CCD de hasta varios minutos, y exponer la película durante unos cuantos minutos antes de que la rotación de campo se deje ver en las esquinas de la imagen.
¿Por qué no dedicar un microcontrolador para accionar los motores paso a paso?
Las velocidades de guiado deben ser actualizadas alrededor de unas 10 o 20 veces por segundo, de otro modo el movimiento del telescopio (que tendría lugar por medio de desplazamientos cortos y rectos) se desviaría apreciablemente del movimiento de la estrella formando un arco. Esto varía mucho sobre el cielo, pero es una regla generalmente adoptada. EL PC/portátil tendría que mantener unos bucles de temporización muy ajustados, enviando los comandos temporizados de forma precisa al microcontrolador, el cual a su vez ordena el movimiento de los motores. Puesto que el PC/portátil debe preocuparse sobre todo de la corrección de los tiempos, ¿por qué no llenar el tiempo de espera para el próximo pulso con código que genere diréctamente las formas de onda de los micropasos para enviarlos directamente a los motores?, de esta forma se eliminaría completamente al microcontrolador.
Me encanta la astronomía de aficionado por que me transporta a los cielos; la poesía de las estrellas, la paz de un prado de montaña durante la puesta de sol, la excitación de descubrir la luz de las estrellas que se encuentran a millones, incluso miles de millones de años luz cuando miro a través del ocular. La verdad es que me gusta construir telescopios y pulir espejos pero, finalmente, el telescopio no es sino un vehículo para abarcar las increíbles distancias a las estrellas. La búsqueda por ordenador, y en particular el seguimiento, es lo suficientemente importante cuando se usa un telescopio como para hacerme afrontar la complejidad de un control por ordenador. Pero sólo una complejidad limitada. El diseño de este proyecto tiene como uno de sus objetivos fundamentales la limitación de la complejidad y la exijencia. Es tan simple como puede hacerse: un único motor por eje, una circuitería de control sencilla, ligeras modificaciones al diseño Dobson estándar, y el uso de cualquier viejo PC-AT para controlar el telescopio.
1. Un único motor paso a paso por eje.
2. Un sencillo circuito de
control.
3. Seguimiento suave con micropasos. Aqui hay una nota de Chuck
Shaw mostrando lo precisa que puede ser la motorización en un telescopio
portátil: "Fui a nuestro lugar de observación, donde tenemos un estupendo
Newton de 32" (80,2 cm.) y tomé mi 14" (35,14 cm.) conmigo para hacer
observaciones con cielo oscuro. ¡¡¡¡El rendimiento del sistema de seguimiento
dejaba sin respiración!!!! Tomé 21 exposiciones de 1 minuto de M-101 a f/3,5
(14,5" f/5 con un reductor de focal de 0,7). ¡¡¡¡Cuando fui a hacer las
operaciones de acumulación, el desplazamiento TOTAL desde la primera a la
ultima imagen fue de sólo 13 pixels....!!!! Esto es, sobre 30 segundos de arco
durante casi 30 minutos que tardé en tomar las imágenes!!! Esto es una deriva
de un segundo de arco por minuto!!!!! ¡¡¡¡¡¡¡¡¡¡¡¡Increible!!!!!!!!!!!!!!!
¿¿¿¿Amo este sistema o no????"
4. Desplazamiento de alta velocidad
mediante sobrevoltaje y medios pasos.
5. Bajo consumo, habitualmente 0,1
Amperios a 12 Voltios de corriente continua.
6. Rotación de campo.
7.
Compensación de cambio de sentido de giro.
8. Corrección de error
periódico.
9. Corrección de refracción atmosférica.
10. Búsqueda
computerizada usando el programa "Guide" del Proyecto Plutón (programa tipo
planetario de Bill Gray),
o por medio de una serie de ficheros aportados
de coordenadas de objetos,
o por medio de la introducción manual de las
coordenadas, incluyendo desplazamientos.
11. Compensación de deriva, para
seguimiento a velocidad lunar y solar, de cometas rápidos, o para anular la
velocidad de seguimiento.
12. Grabación de correcciones de guiado para
posterior análisis e incorporación en el fichero de corrección de error
periódico.
13. Opción de siderostato: evita que la montura bascule, en
lugar de ello mueve el telescopio más alla del zénit.
14. Límites en
altitud y azimut del movimiento por programa.
15. Recuperación de la
última posición y la última orientación respecto del cielo.
16. Posición
de reposo para almacenamiento.
17. Codificadores angulares opcionales, al
objeto de trazar el desplazamiento del telescopio cuando se mueve a mano.
18. Visualización en tiempo real de todas las coordenadas y el estado del
sistema.
19. Movimientos de desplazamiento robotizados, descritos mejor
como "sobrevuelos" con altos aumentos.
20. Modo "tour", donde un botón te
lleva de objeto a objeto almacenado en un fichero de datos.
21.
Posibilidad de grabar la posición del telescopio desde el ocular, para
posterior uso en ficheros de datos.
22. Cierto número de opciones de
prueba.
La desventaja de este sistema es que se necesta un PC o un portátil. Sin
embargo, se puede reunir un sistema mínimo por poco dinero: $100 (unas 15.000
ptas.) por una placa madre con un 486, fuente de alimentación y caja, otros
$40 (6.000 ptas.) por una disquetera y teclado, y $100 (unas 15.000 ptas.) por
un monitor usado, el total es de $240 (36.000 ptas.).
Las superficies de rodaje de la montura deberían convertirse a un acoplamiento con rodamientos a bolas sobre formica (para telescopios pequeños) o sobre aluminio o chapa galvanizada (para telescopios mayores).
la motorización en altitud... 

la motorización en azimut... 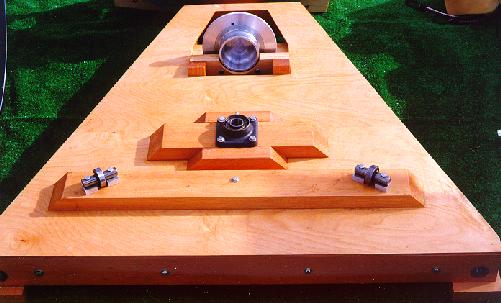
sencilla modificación al Dobson de Dirk Dhoore... 
Las monturas rígidas tipo Dobson ofrecen grandes superficies de rodaje para acoplar los motores. El telescopio puede ser motorizado de varias formas. Un sistema de "motor-directo" se compone de una varilla roscada presionada contra el borde de un gran círculo de acoplamiento. La rosca se imprime en el borde del círculo bien por medio de fibra de vidrio, JB-Weld, o masilla de madera. Véase mi artículo del número de Abril de 1979 de la revista "Sky and Telescope" para una descripción de este método. El artículo fue inspirado por otro anterior en el número de Junio de 1974 de la misma revista.
Muchos telescopios profesionales usan grandes ruedas circulares movidas por ejes mecanizados. Esto evita los errores inherentes a los sistemas de rueda dentada y sinfín. Los errores típicos del sistema rueda dentada-sinfín incluyen errores periódicos y aleatorios. Los errores periódicos son causados por la forma elíptica del engranaje y por el descentrado del sinfín en su eje. Los errores aleatorios son causados por diferencias diente a diente y por los desajustes entre los componentes cuando el movimiento cambia de dirección.
Usando un reductor en la primera etapa y una rueda en la etapa final, los errores presentes en el reductor se dividen por la relación entre el eje y la rueda finales. Por ejemplo, si el reductor tiene un error de un minuto de arco, y el acoplamiento final entre rueda y eje tiene una relación de 30 a 1, el error final en el ocular será de 2 segundos de arco.
La transmisión en altitud consiste en un eje mecanizado de 0,625" (1,57 cm.) presionado contra una rueda de madera de 28" (70,28 cm.) con una chapa de aluminio en su borde. El eje de accionamiento se encuentra a 30 grados de la vertical, siendo el otro punto de apoyo un rodamiento a bolas. El acoplamiento de azimut consiste en otro eje de 0,625" (1,57 cm.) cuyo extremo ha sido mecanizado en forma de cono y que está situado bajo una placa circular de aluminio de 28" (70,28 cm.) de diámetro y 0,25" (0,628 cm.) de grosor. Los otros dos puntos de contacto son cojinetes a bolas. Puesto que las ruedas son bastante grandes, el telescopio presenta una rigidez inherente elevada. Una ventaja del diseño Dobson sobre el ecuatorial es que la gravedad tiende a tensar de forma natural las ruedas y los ejes del accionamiento.
Comentarios
sobre reductores y acoplamientos por Tom Cathey.
Comentarios sobre
acoplamientos con ruedas por Louis Boyd.
Dos métodos de motorización de telescopios son: motores paso a paso en lazo abierto y servomotores en lazo cerrado con realimentación por tacómetro o codificadores. Con los sistemas de motor paso a paso en lazo abierto a los motores se les ordena moverse: no hay realimentación ni información acerca de si el movimiento tuvo lugar. Los motores paso a paso giran ángulos precisos de (normalmente) 200 pasos completos por vuelta. Siendo conservador en la elección de los motores paso a paso, podemos asegurar que nunca se bloquearán. La mayoría de impresoras de matriz ubican la cabeza de impresión y el papel de esta forma. Los servomotores necesitan algún tipo de realimentación para informar sobre el giro del eje del motor. Un tacómetro o un codificador de posición angular da información acerca de ello, pero a costa de una mayor complejidad de la electrónica y de los programas de control. En la práctica, ambos métodos funcionan bien. Para nuestro propósito los motores paso a paso en lazo abierto son más sencillos de controlar sobre la gran variedad de tipos y características de telescopios, así como las diversas velocidades necesarias para un acoplamiento altacimutal.
Quizás el nombre de "motor paso a paso" no sea el más adecuado; este tipo de motor fue concebido en sus orígenes para trabajar con corriente alterna síncrona que varíe suavemente. Si en lugar de usar corriente alterna se aplica corriente continua a uno de los bobinados, luego al siguiente, el motor se mueve en pasos (desplazamientos discretos), de aquí el nombre. Cuando se hace que la corriente continua (CC) varíe de forma síncrona, en nuestro caso por medio de un método digital llamado PWM (Pulse Width Modulation, Modulación de Anchura de Pulso), el motor retorna a su estado de movimiento suave original.
Un motor paso a paso típico consiste en un eje rotor permanentemente magnetizado y mecanizado con dientes radiales, que gira dentro de un estator que también contiene dientes. Dependiendo de cómo se magnetizan los dientes del estator, el rotor se alinea por sí mismo con una orientación determinada. El estator tiene cuatro bobinados que magnetizan varios dientes. Para controlar el motor, se debe conmutar la corriente de un bobinado del estator al siguiente.
Una secuencia de pasos completos, o modo de excitación, viene a ser la siguiente:
paso completo / número de bobinado...
1 2 3 4 1 ON OFF OFF OFF 2 OFF ON OFF OFF 3 OFF OFF ON OFF 4 OFF OFF OFF ONEn cada paso completo, el rotor se alinea con el bobinado que está conectado a corriente (en ON).
La secuencia o modo de excitación de medios pasos es como sigue:
Medio paso / Número de bobinado...
1 2 3 4 1 ON OFF OFF OFF 2 ON ON OFF OFF 3 OFF ON OFF OFF 4 OFF ON ON OFF 5 OFF OFF ON OFF 6 OFF OFF ON ON 7 OFF OFF OFF ON 8 ON OFF OFF ON
Una importante mejora en la suavidad del movimiento tiene lugar cuando se usan micropasos. En el pasado, las motorizaciones usadas en diseños altacimutales de aficionado han fallado en ocasiones debido a la vibración inducida causada por una resolución de paso relativamente basta. Con un PC controlando la forma de onda de la tensión aplicada a los cuatro bobinados del motor paso a paso, se puede dividir facilmente cada paso completo en muchos micropasos.
Para controlar el movimiento con micropasos: La corriente en el bobinado A va decayendo suavemente siguiendo una curva como la de la función matemática "coseno" (curva cosenoidal). Aplicando la corriente completa al bobinado A se posiciona el rotor directamente sobre aquel. Aplicando una corriente igual a los bobinados A y B el rotor se posiciona entre ambos. Aplicando una corriente al bobinado B que sea el 70% de la aplicada al bobinado A el rotor se posiciona exactamente a 1/4 de la distancia entre los bobinados A y B. Por la naturaleza de inverso del cuadrado de la fuerza electromagnética, moviendo suavemente el rotor entre los bobinados A y B resulta en un modelo de curva tipo coseno/seno que debe ser aplicada a ambos bobinados.
Las limitaciones para el uso de los micropasos se dan debido a los errores absolutos en las posiciones de los dientes, típicamente 1/25 de un paso completo, y el desplazamiento producido por el par de carga. El error de desplazamiento resulta ser el mínimo cuando el rotor se ubica en un bobinado, y máximo cuando se posiciona entre bobinados. Si el par de carga es el 10% del total, el error en el eje cuando el rotor se encuentre entre bobinados será un 10% del paso completo. Con micropasos que totalicen 10 por paso completo tenemos un compromiso razonable entre suavidad de movimiento y precisión en la posición del rotor. Más micropasos pueden dar lugar a un movimiento más suave, pero no tendrán como resultado una mayor precisión en la posición del rotor.
El PC usa bits de salida del puerto paralelo para controlar de forma simultánea la forma de onda de los ocho bobinados correspondientes a los dos motores paso a paso. La forma de onda de la corriente se genera por medio de una técnica llamada PWM (Pulse Width Modulation), o modulación de anchura de pulso. La corriente completa se aplica cuando se conecta (ON) por un tiempo determinado el bobinado, para a continuación ser desconectada (OFF). El efecto acumulativo de cambiar rápida y repetidamente ON y OFF en el motor es el mismo que el de usar una corriente suave cuyo valor sería la media de los ON y OFF. Ajustando el porcentaje entre ON y OFF la corriente puede ser controlada de forma precisa. El par permanece alto en cualquier caso independientemente de la velocidad del motor, puesto que cuando se aplica ON se aplica la corriente completa al bobinado.
Para una resolución adecuada en el control de la corriente, la secuencia de ONs y OFFs debe totalizar 100 o más. Como ilustración, digamos que el número total de ONs y OFFs por fase es 10. Si el bobinado A se controla con el bit número 0 (palabra de salida en el puerto = 1 para que este bit esté a ON), y el bobinado B es controlado por el bit número 1 del puerto (palabra de salida en el puerto = 2 para que este bit esté a ON), entonces la secuencia de palabras o bytes de control para un paso completo con una corriente media máxima es (ignoraremos los otros bobinados controlados por los bits números 2 a 7 del puerto):
secuencia de palabras de control de salida en el puerto (10 pulsos por
fase):
---------------------------------------------------------
fase
número 1: 1 1 1 1 1 1 1 1 1 1
fase número 2: 2 2 2 2 2 2 2 2 2 2
Para pasos completos con la mitad de la corriente:
secuencia de palabras de control de salida en el puerto (10 pulsos por
fase):
---------------------------------------------------------
fase
número 1: 1 1 1 1 1 0 0 0 0 0
fase número 2: 2 2 2 2 2 0 0 0 0 0
Para medios pasos con la mitad de la corriente, donde el medio paso intermedio consiste en aplicar corriente a ambos bobinados (A y B):
secuencia de palabras de control de salida en el puerto (10 pulsos por
fase):
---------------------------------------------------------
fase
número 1: 1 1 1 1 1 0 0 0 0 0
fase número 2: 3 3 3 3 3 0 0 0 0 0
fase
número 3: 2 2 2 2 2 0 0 0 0 0
Para realizar micropasos, queremos ubicar el rotor en posiciones intermedias entre los bobinados A y B. Para posicionar el rotor a un 25% de distancia del bobinado B, el rotor debe "sentir" al bobinado B como máximo 1/3, ubicandose 3 veces más cerca del bobinado A que del bobinado B. Puesto que los campos electromagnéticos se propagan con la ley del inverso del cuadrado de la distancia, la corriente suministrada al bobinado B debe ser la raiz cuadrada de 1/3, esto es, un 60% de la corriente aplicada al bobinado A:
secuencia de palabras de control de salida en el puerto (10 pulsos por
fase):
---------------------------------------------------------
bobinado A a 100% corriente : 1 1 1 1 1 1 1 1 1 1
+ bobinado B a 60%
corriente: 2 2 2 2 2 2 0 0 0 0
= bobinado A + bobinado B: 3 3 3 3 3 3 1 1
1 1
Así, para tener cuatro micropasos por paso completo con corriente máxima:
secuencia de palabras de control de salida en el puerto (10 pulsos por
fase):
---------------------------------------------------------
fase
número 1: 1 1 1 1 1 1 1 1 1 1 (corriente en A = 100%, B corriente = 0%)
fase número 2: 3 3 3 3 3 3 1 1 1 1 (corriente en A = 100%, B corriente =
60%)
fase número 3: 3 3 3 3 3 3 3 3 3 3 (corriente a A = 100%, B corriente
= 100%)
fase número 4: 3 3 3 3 3 3 2 2 2 2 (corriente a A = 60%, B
corriente = 100%)
fase número 5: 2 2 2 2 2 2 2 2 2 2 (corriente a A = 0%,
B corriente = 100%)
y para 10 micropasos por paso completo:
---------------------------------------------------------
fase número
1: 1 1 1 1 1 1 1 1 1 1 (rotor ubicado en bobinado A, corriente en A = 100%,
corriente en B = 0%)
fase número 2: 3 3 3 1 1 1 1 1 1 1 (rotor ubicado 9:1
veces más cerca de A que de B, corriente en A = 100%, corriente en B =
raíz(1/9) = 33%)
fase número 3: 3 3 3 3 3 1 1 1 1 1 (rotor ubicado 8:2 o 4
veces más cerca de A que de B, corriente en B = raíz(1/4) = 50%)
fase
número 4: 3 3 3 3 3 3 3 1 1 1 (rotor ubicado 7:3 o 2,3 veces más cerca de A
que de B, corriente en A = 100%, corriente en B = raíz(3/7) = 65%)
fase
número 5: 3 3 3 3 3 3 3 3 1 1 (rotor ubicado 6:4 o 1,5 veces más cerca de A
que de B, corriente en A = 100%, corriente en B = raíz(2/3) = 82%)
fase
número 6: 3 3 3 3 3 3 3 3 3 3 (rotor ubicado 5:5 o a igual distancia de A que
de B, corriente en A = 100%, corriente en B = 100%)
fase número 7: 3 3 3 3
3 3 3 3 2 2 (opuesto de fase número 5)
fase número 8: 3 3 3 3 3 3 3 2 2 2
(opuesto de fase número 4)
fase número 9: 3 3 3 3 3 2 2 2 2 2 (opuesto de
fase número 3)
fase número 10: 3 3 3 2 2 2 2 2 2 2 (opuesto de fase número
2)
Estos diez valores se definen en el programa, escrito en C, como una matriz: PWM[0] a PWM[9]. En C, el primer elemento de la matriz tiene el índice (o el desplazamiento) igual a 0.
Hacen falta ligeros retoques a los valores de PWM para reflejar el tiempo finito de transición entre los estados ON y OFF de los transistores de potencia, inversores, optoacopladores, el puerto paralelo, diferencias de velocidad entre PCs, y diferencias entre motores y par de carga.
Aparte de la vibración excesiva cuando se trabaja en pasos completos, los motores paso a paso tienen otra limitación que debe ser resuelta: no les gusta girar muy deprisa. A la vez que el ordenador conmuta la corriente de los bobinados de ON a OFF, se tiene como resultado la producción de la fuerza contraelectromotriz. Cuando una fuente de corriente se apaga, el campo magnético que desaparece a través del bobinado genera un pico de corriente que podría destruir los transistores de potencia.
Un diodo de retorno evita los picos de tensión, proporcionando una vía para que circule la corriente de vuelta al bobinado. Sin embargo, esto, a su vez, ralentiza la disminución de la corriente. El resultado es siempre que baja el par cuando el motor trata de girar más deprisa. Un diodo zener se usa con los diodos de retorno para permitir que sólo la tensión sobre el valor del zener retorne a la fuente de corriente. Esto evita los picos de tensión, y también la acción de frenado de los diodos de retorno.
La combinación del uso de tensiones más altas que aquellas para las que está preparado el motor en caso de funcionamiento continuo, y el uso de rampas suaves de giro para el aumento y disminución de velocidad, permite lograr velocidades varias veces más altas que las que se conseguirían sin estos mecanismos. Se pueden lograr velocidades de hasta 4.000 medios pasos por segundo con pares moderados. Yo uso dos baterías de 12 Voltios en serie para generar 24 Voltios y accionar con ellas motores paso a paso de 6 Voltios. Esto asegura suficiente voltaje para mover los motores a alta velocidad. Una batería de 12 V en solitario tambien suministra suficiente corriente para los motores. El consumo de corriente para ambos motores combinados es de 0,1 Amperios cuando se trabaja con micropasos y de 0,3 Amperios cuando se desplaza el telescopio rápidamente.
Lo deseable es asignar el tamaño del paso del motor como un compromiso entre resolución de guiado con micropasos y velocidad de desplazamiento rápida. En mi montura de 20" f/5, trabajando con los componentes mencionados anteriormente y con 10 micropasos por paso completo:
1 micropaso = 360 grados * 3600 seg. de arco/grado * 0,625"/28" (rueda final) * 1/60 (reductor) * 1/200 (rotación del eje por cada paso completo) * 1/10 (micropasos por paso completo) = 0,24 seg. de arco.
Esto es bastante más pequeño que el típico disco de 2 segundos de arco que nos permite distinguir habitualmente un cielo limpio, y es además suficientemente pequeño para que no haya problemas con las vibraciones. Por otra parte, acelerando y frenando gradualmente el motor podemos llegar a velocidades de 4.000 medios pasos por segundo.
velocidad máxima = 2,4 seg. de arco/paso * 4000 medios pasos/seg * 1/2 medio paso/paso * 1/3600 grados/seg. de arco= 1,3 grados/seg.
¡Más que suficiente para mover un telescopio tan grande y tener tiempo para agacharse!
el circuito y el mando al completo... 
un circuito de la unidad de rotación de campo opcional... 
una foto de la caja de la electrónica... 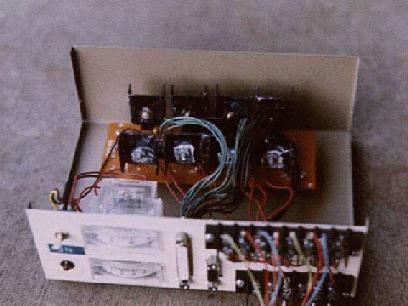
Yo añadí un voltímetro y un amperímero para medir la tensión de la batería y el consumo de corriente de los motores. Recomiendo poner todos los enchufes y terminales en el frontal o la trasera de la caja. El circuito es suficientemente simple para usar cableado punto a punto. Es aconsejable verificar dos y tres veces todas las conexiones, siguiendo a mano todos los cables, y usar un ohmmetro para verificar que no hay cortocircuitos (medir la resistencia entre los puntos). La red de diodos de potencia y zeners es esencial para evitar la destrucción de los transistores por la fuerza contra-electromotriz generada en los motores. Estos picos de voltaje también podrían cortocircuitar a través del puerto paralelo. Para verificar el circuito puede usarse inicialmente una batería de 6 voltios para las comprobaciones, de modo que si hay algún problema de cableado no se corra el riesgo de averiar el puerto paralelo del PC.
Considerando que se usan tensiones relativamente bajas de 6 a 12 Voltios, el aislamiento del PC/portátil por medio de opto-acopladores no es estrictamente necesario. Si se alimentan los motores paso a paso con 24 Voltios o más, se debería considerar la opción de usar optoacopladores. Para ello se puede usar el circuito siguiente, asegurandose de asignar el valor CERO a la variable InvertOutput del fichero Config.Dat.
El PC genera las formas de onda de voltaje para los cuatro bobinados de los motores paso a paso, y las saca por el puerto paralelo del PC, resultando en un circuito de control muy sencillo. Los seis inversores del 74LS04 reciben la salida del puerto paralelo y proporcionan un drenado adecuado de corriente para alimentar los transistores de potencia. Los transistores de potencia deberían usar disipadores de calor.
El mando usa los cuatro bits del puerto paralelo desde la base del puerto paralelo + 1, y una conexión externa a +5 V CC (corriente continua), totalizando 5 líneas. Un cable largo de 9-pines serie de PC se usa para ello. Los pulsadores se usan para el control direccional. El conmutador de 3 vías se usa para indicar la iniciación número 1 del programa, apagado, o la iniciación número 2, mientras que el conmutador de 2 vías asigna la velocidad: velocidad lenta con micropasos o rápida con medios pasos. Todas las lineas se conectan a tierra con resistencias de 220 Ohmios, de modo que cuando ningún botón o conmutador está activado el mando conecta todas las líneas a tierra, o valor lógico bajo. Cuando se pulsa un botón o se mueve un conmutador, la tensión de +5 V se aplica a el/los bit(s) apropiados del puerto paralelo. Algunos de los botones y conmutadores están conectados a más de un bit. Los diodos se colocan en las salidas de los botones y conmutadores para asegurar que sólo los bits deseados se activan. Los pines restantes del puerto paralelo, del 18 al 25, son tierra.
Conexiones a un puerto paralelo de 25 pines:
2 motor paso a paso para altitud - rojo
3 motor paso a paso para
altitud - verde
4 motor paso a paso para altitud - rojo/blanco
5 motor
paso a paso para altitud - verde/blanco
6 motor paso a paso para azimut -
rojo
7 motor paso a paso para azimut - verde
8 motor paso a paso para
azimut - rojo/blanco
9 motor paso a paso para azimut - verde/blanco
1
pulso del motor de rotación de campo
14 dirección del motor de rotación de
campo
13 entrada del mando (puesta a tierra con una resistencia de 220
Ohmios)
12 entrada del mando (puesta a tierra con una resistencia de 220
Ohmios)
10 entrada del mando (puesta a tierra con una resistencia de 220
Ohmios)
11 entrada del mando (puesta a tierra con una resistencia de 220
Ohmios)
18-25 tierra
mando:
- conmutador 3 vías a la izquierda: para iniciación de posición número 1, y
hacer otras tareas, activa los pines 13,10
- conmutador 3 vías en el
medio: neutro - ni hace ni activa nada
- conmutador 3 vías a la derecha:
para iniciación de posición número 2, y hacer otras tareas, activa los
pines12,10
- conmutador 2 vías a la izquierda: avance lento por
micropasos, activa la línea 11
- conmutador 2 vías a la derecha: avance
rápido por medios pasos, no activa nada
- pulsador superior, en pulsación
ON = Arriba, activa el pin 13
- pulsador inferior, en pulsación ON =
Abajo, activa el pin 12
- pulsador izquierdo, en pulsación ON = CCW,
activa el pin 10
- pulsador derecho, en pulsación ON = CW, activa los pins
13, 12
En cualquier telescopio en que el eje de rotación no apunte exáctamente al polo celeste se produce una rotación lenta del campo de visión. La rotación de campo es independiente del tamaño del campo imagen, por ejemplo, un telescopio grande con muchos aumentos experimenta el mismo ángulo de rotación de campo que un pequeño telescopio de campo amplio a bajos aumentos. La rotación del campo varía mucho de una zona del cielo a otra, desaparece al este y al oeste, es terrible en el cenit, y se aproxima a la rotación sidérea cuando se apunta al meridiano. Un motor puede llevar a cabo la función de girar lentamente el mecanismo de enfoque del ocular para compensar la rotación de campo.
Para observación visual no se necesita rotar el campo. Para observación con CCD, una exposición de 5 a 20 minutos en la mayor parte del cielo con los chips CCD habituales tampoco requiere de rotación del campo. Si se tiene un CCD con un gran número de pixels, o se planea hacer astrofotografía a foco primario, entonces es deseable añadir la rotación de campo. El programa de control muestra la rotación de campo en tiempo real, de modo que se puede planificar la exposición de acuerdo con la rotación del campo. He aquí como juzgar la rotación de campo: para un chip CCD que tiene varios cientos de pixels por lado, el número total de píxels en su perímetro es aproximadamente 1000. Esto significa que podemos tolerar una rotación de 360 grados/1000 unidades de resolución, esto es 1/3 de grado. Yo superviso el guiado en tiempo real, comprobando la rotación de campo durante 10 segundos más o menos. Si parece que puedo realizar la exposición deseada, entonces sigo adelante. Si no es éste el caso, espero hasta que el objeto se coloca en una posición del cielo más favorable, o ajusto el tiempo de exposición.
Puesto que la unidad de rotación de campo necesita girar sólo con pasos
finitos lentamente, un sencillo chip controlador de motores paso a paso es
todo lo necesario, con entradas de paso y dirección. Parar minimizar la
vibración, sugiero que una rotación de campo de 1 minuto de arco por paso.
Esto es suficientemente fino para evitar que la rotación se deje ver en
películas de 35 mm. de grano fino. El circuito de rotación sugerido usa el
chip SAA1042. Para más información sobre este chip pulsar aqui.
Para ver una unidad de rotación de campo muy bien diseñada se puede ver el proyecto de Dobson
computerizado de Dan Gray.
de Radio Shack:
a. (8) transistores TIP-120
b. (8) disipadores para
el punto anterior
c. (8) resistencias 1/4W 470 ohm
d. (8) diodos 2,5A
100 V PIV
e. (4) resistencias 1/4W 220 ohm
f. (2) inversores 74LS04 (6
por componente)
g. (1) caja de instrumentación grande
h. (1) placa de
circuito 276-160
i. (1) cable de 25 pines
j. (1) kit de conector de 25
pines
k. (2) kits de conectores de 9 pines
l. (4) pulsadores -
abiertos en reposo (OFF), cerrados al pulsarse (ON)
m. (1) un conmutador
de tres vías desconectado en la posición central
n. (1) conmutador de dos
vías
o. (1) una bolsa de diodos pequeños
p. (2) zócalos para
integrados de 14 pines
q. (1) regulador de tensión 7805
r. (1)
disipador para el regulador anterior
s. (3) condensadores de 0,1 uF
de una tienda de electrónica bien surtida:
a. (4) diodos zener de 30V
5W
de un suministrador de control de motores tal como:
Torque
Transmissions (TorqueTran@aol.com, 1-216-352-8995) (reducción de 60:1, usar
una reducción final por rueda de 40:1) o
Allied Devices (100:1, usar una
reducción final de 24:1) (1-516-223-9100) o los reductores a medida de Andy
Saulietis (240:1, así que usar una reducción final de 10:1)
(andydtg@phoenix.net) o
Los reductores Byers de Dave Radosevich (360:1,
usar en este caso una reducción final de 7:1)
(Dave_Radosevich@qmail4.nba.TRW.COM):
a. 1 reductor por eje ~$100 (buscar un reductor cuyo factor de reducción, multiplicado por la reducción final de la montura resulte ser 2400:1, esto da 1/4 de segundo de arco por micropaso, el tamaño exacto de micropaso se anota en el fichero CONFIG.DAT)
de una casa tal como:
C&H Sales (1-800-325-9465) o
Herbach and
Rademan (compras: 1-800-848-8001, catálogo 1-215-788-5583) o
Gateway
Electronics en San Diego (1-619-279-6802), componente M061-FDD2 35 oz-in 5V@1A
con eje de 1/4" y 6 cables, $9 (unas 1350 ptas.) cada uno o
Marlin P Jones
Associates (www.mpja.com) (también es una fuente barata de unidades de control
de motores unipolares paso a paso unipolares controlados por medios pasos) o
Jameco (1-800-831-4242) o Apogee,
una fuente en la red de motores paso a paso baratos
a. (2) motores paso a paso: 6-12 VDC .3 a 1 amp/fase,par de 20+ in-oz
($20+), preferiblemente con 6 cables, aunque motores de 5 u 8 cables también
son válidos; los motores bipolares de 4 cables no son adaptables.
Preferiblemente de 200 pasos por vuelta.
El chip opcional SAA1042 se puede comprar a Newark Electronics Teléfono:
(800) 4NEWARK (http://www.newark.com/OLCATLG.HTM) el número de componente en
su catálogo es: 08T SAA1042V, Manuf Pt #: SAA 1042v, Manuf: Motorola, $12,01
para cantidades de 1 a 9 unidades
El puerto paralelo es un interfaz ideal para controlar telescopios, particularmente con portátiles en el lugar de observación. El puerto paralelo usa 8 bits para salida, típicamente situados en la dirección de puerto 0x378. En el conector de 25 pines, los 8 bits de salida son los pines 2 a 8, desde el bit menos al más significativo. Estos 8 bits de salida son perfectos para controlar los dos motores paso a paso necesarios para mover un telescopio en modo altacimutal. El puerto paralelo no puede entregar o drenar corrientes altas directamente, por lo que se usa los 6 inversores del 74LS04 para servir de interfaz entre el puerto paralelo y los transistores que accionan los motores.
El puerto paralelo tiene 5 bits de entrada en la dirección de puerto 0x379.
Estos bits de entrada son los pines 15, 13, 12, 10, y 11 del conector de 25
pines, con el 11 invertido. El pin 15 activa el bit 8, el pin 13 el bit 16, el
pin 12 el bit 32, el pin 10 activa el bit 64 y el pin 11 activa el bit 128.
Dependiendo de qué líneas estén activadas, los valores pueden variar entre 8 y
248. Además, el puerto paralelo tiene 4 bits que pueden ser bien de entrada o
de salida y se encuentran en la dirección de puerto 0x37A. Estos 4 bits
aparecen en los pines 1, 14, 16, y 17 del conector de 25 pines. Los bits 1, 14
y 17 están invertidos. Los valores leídos pueden variar de 0 a 15.
El programa ha pasado por sucesivas reencarnaciones, comenzando como código ensamblador de 6502 para un Commodore 64, cuando los Commodore 64 aparecieron (yo compré mi Commodore 64 por el increíble precio de $600, sin cinta ni disco, ¡y tenía que volver a escribir mis programas cada vez que conectaba de nuevo el ordenador!). Desafortunadamente, el valiente procesador 6502 a 2 megahercios sólo podía pasar revista para centrado de los objetos cada pocos segundos. El sueño de una montura de aficionado barata del tipo altacimutal parecía muy lejos, hasta que las máquinas tipo AT llegaron. El código fue entonces reescrito en C. Más tarde el código pasó a su forma orientada a objetos en un 386 bajo C++. Ahora, con el fin de hacer el código tan universal y fácil de portar como sea posible, el código está escrito en ANSI C. Las funciones que están diréctamente asociadas al hardware de bajo nivel, tal como el puerto paralelo y el reloj de la BIOS, usan punteros para acceder a las ubicaciones de memoria apropiadas. Para máquinas que no sean del tipo DOS, será necesario modificar estas partes del código.
El programa usa el popular algoritmo de conversión de las dos estrellas, basado en un artículo de Febrero de la revista "Sky and Telescope" escrito por Toshimi Taki, para pasar entre coordenadas acimutales y ecuatoriales. El telescopio sólo necesita ser precisamente alineado sobre dos estrellas separadas ampliamente usando un ocular reticulado de alta potencia; no hay necesidad de poner la montura horizontal. El telescopio puede ser también puesto en estación con un planeta, por ejemplo poco después de la puesta de sol. Después de unos pocos minutos de recentrado con micropasos, el telescopio se pone en estación de nuevo con el mismo objeto. El telescopio continuará siguiendo al objeto, manteniéndolo centrado en el campo del ocular por una hora o dos. Tanto la primera posición de iniciación como la segunda pueden ser vueltas a introducir tantas veces como se desee. El algoritmo de conversión de las dos estrellas permite la introducción de errores de construcción. Por ejemplo, uno de los puntos de apoyo del eje de altitud puede estar un poco más bajo que su contrario. Normalmente esto causaría un error de apuntado, pero el algoritmo de conversión lo compensará una vez dado el valor del error. Todas las posiciones de inicio se salvan en un fichero para posterior análisis.
El programa es conducido por eventos, tanto del teclado como del mando. Si no ocurre ningún evento, entonces el telescopio se mueve a las coordenadas ecuatoriales actuales. Si las coordenadas permanecen como estaban, el telescopio las sigue. Si se introducen nuevas coordenadas, el telescopio se desplaza. El desplazamiento solo se puede interrumpir pulsando o liberando un botón del mando o el teclado, y por los límites de altitud y azimut si la opción bloqueo de seguimiento por medios pasos está activada. El guiado debería interrumpirse si se sale a otro programa. Cuando se sale del programa, se almacenan las coordenadas altacimutales junto con cualquier posición de iniciación.
El programa se adapta a los errores por los cambios de sentido del movimiento y tiene rutinas para manejar la corrección de errores periódicos, o PEC, por cada eje. Una función "guide", de guiado, también se incluye de modo que el guiado por un minuto o dos elimina cualquier pequeña deriva residual.
scope.exe - el programa ejecutable
config.dat - el fichero de
configuración
scope.c, common.c, scope.h, common.h - los ficheros de
código fuente
current.dat - últimas coordenadas altacimutales almacenadas
en grados
onetwo.dat - últimas coordenadas de iniciación almacenadas en
grados
init.dat - una grabación de todos los valores de iniciación, en
grados (Ascensión Recta, Declinación, Altitud, Azimut, Hora Sidérea)
pec.dat - éste es el fichero usado para las correcciones de error
periódico en los motores
guide.dat - una grabación de las correcciones de
guiado
bstars.dat, messier.dat, 5magstar.dat, ngc0.dat through ngc7.dat, e
ic.dat son todos ficheros con catálogos de objetos
outguide.dat - lista de
posiciones de salida dadas por el programa Guide del Proyecto Plutón
*.scr
- ficheros de desplazamientos
record.dat - almacena las posiciones
ecuatoriales por medio del mando
Ra_hrs (Ascensión recta, horas)
Ra_min (Ascensión recta, minutos)
Ra_sec (Ascensión recta, segundos)
Dec_deg (Declinación, grados)
Dec_min (Declinación, minutos)
Dec_sec (Declinación, segundos)
nombre o comentario
con todos los valores en una línea por objeto; por ejemplo,
12 23 14 33 53 09 posición de prueba
Para los interesados, tengo un programa de conversión que convierte los formatos de fichero de Megastar y Sky Commander al formato de fichero que usa el programa scope.exe.
sumar la deriva ecuatorial a la posición ecuatorial actual,
actualizar
el campo de estado o de trabajo con los codificadores opcionales: bien
mediante un cálculo o una escritura directa a la memoria de video o leyendo
los codificadores o asignando las coordenadas actuales a las coordenadas de
los codificadores,
comprobar si hay eventos del teclado, si no es así,
comprobar eventos procedentes del mando, si no los hay,
comprobar si
hay eventos de IACA, si no los hay,
comprobar si el motor de rotación de
campo necesita ser accionado,
entonces mover a las coordenadas
ecuatoriales actuales tal como sigue:
se calculan las nuevas coordenadas
altacimutales basándose para ello en el tiempo sidéreo que fue calculado
cuando tuvo lugar el pulso del reloj de la bios,
se calcula la diferencia
entre las coordenadas altacimutales actuales y las recientemente calculadas,
se determina el desplazamiento a relizar en cada eje y se decide entre
usar micropasos o medios pasos, si se opta por micropasos,
se verifica si
tendrá lugar un cambio de sentido, si no es así,
se distribuyen los
micropasos sobre los pulsos del reloj de la bios dividiendo el número de
micropasos por MsTicksRep, la cuenta de PWM por pulso de reloj de la bios: si
los micropasos exceden de MsTicksRep, entonces se reduce el número de
micropasos por paso completo hasta medios pasos,
se generan continuamente
pulsos PWM, verificando si ha tenido lugar un pulso de reloj de la bios al
final de cada cicho PWM: un PWM consiste en sacar por el puerto paralelo una
matriz previamente calculada de ONs y OFFs para los bobinados de los motores
paso a paso,
cuando tiene lugar un pulso del reloj de la bios, los PWM
terminan y se recalcula el tiempo sidéreo,
las coordenadas altacimutales
actuales se refrescan para reflejar el número de micropasos que realmente
tuvieron lugar,
se recalcula la altitud para incluir la refracción
atmosférica,
se recalculan las coordenadas altacimutales para incluir
cualquier compensación por cambio de sentido que haya tenido lugar,
se
actualizan las coordenadas altacimutales para incluir la corrección de error
periódico (PEC) basándose en la posición de los rotores de los motores,
las coordenadas altacimutales actuales se actualiza para incluir la deriva
altacimutal,
las coordenadas altacimutales actuales se actualizan para
incluir los movimientos de guiado
David Lane, autor de The Earth Centered Universe (ECU), ha diseñado un interfaz serie sencillo y barato para codificadores de cuadratura. Se llama MicroGuider (MGIII), y los detalles completos de construcción y la lista de componentes puede encontrarse aquí. El precio de los componentes, excluyendo el de los codificadores, está en torno a los $100.
Puesto que las capacidades de los ordenadores varían mucho, y dado que hay una gran variedad de motores y monturas de telescopio, será necesario emplear algo de tiempo optimizando valores en el fichero de configuración, config.dat. Yo uso un portátil con un 486/100. De todas formas incluyo el fichero config.386, que contiene los valores que usaba en mi viejo 386/20 con coprocesador matemático 387.
Para configurar el desplazamiento por medios pasos: asignar la variable HsTimerFlag a 1, habilitando las temporizaciones por interrución. El intervalo entre interrupciones es independiente de la velocidad de la cpu así que, sin importar la velocidad del ordenador, asignar MaxDelay a 2000, MinDelay a 500, y HsRampXa 5. Asegurarse de ejecutar scope.exe despues de arrancar el DOS, o salir de Win95 a DOS. La velocidad de arranque del motor se ajusta con MaxDelay, la velocidad más rápida con MinDelay, y el tiempo de subida y bajada con HsRampX. Ajustar estos valores para adaptarte a tu combinación de motores paso a paso, voltaje suministrado a los motores, y el par de carga que precisa el telescopio. Si es necesario usar el método de retraso de la temporización de los medios pasos, asignar a HsTimerFlag el valor 0. Si tienes una cpu cercana a un 386/20, comienza con MaxDelay 8000, MinDelay 3000, y HsDelayX 1. Si tienes una cpu cercana a un 486/100, cambia HsDelayX a 2. La velocidad comienza con un valor (MaxDelay-MinDelay)*HsDelayX, y alcanza un valor máximo de MinDelay*HsDelayX. HsDelayX se usa como multiplicador para mantener MaxDelay y MinDelay dentro de valores razonables; de otro modo el tamaño de la matriz se hace demasiado grande. De nuevo, ajusta los valores como sea necesario para que sean los adecuados a tus motores, la corriente que se les aplica, y el telescopio.
Para configurar los desplazamientos por micropasos: comenzar con los valores sugeridos de PWM[], dentro de un rango de 100 hacia abajo. Comenzar con MsDelayX = 1, y MsPause = 0 si tu ordenador es lento, y MsDelayX = 6 si se usa una máquina más rápida. Ajusta MsDelayX de modo que el valor mostrado de PWMRepsTick (activa el seguimiento durante unos segundos) se encuentre entre 20 y 40. Algunas personas han informado de diferentes grados de éxito en máquinas lentas con valores de PWMRepsTick tan bajos como 7. Valores tan altos como de 50 a 100 tambien funcionarán. Encuentra el valor de MsDelayX que resulte en una rotación suave del motor, ajustando MsPause a valores más altos, posiblemente de hasta 500 o más, para reducir el consumo de corriente y el voltaje, y para suavizar la rotación del motor.
He aquí como se planifica el movimiento por micropasos: 
Para cambiar la dirección de giro del motor, intercambiar los cables números 1 y 2 o, alternativamente, los cables números 2 y 4.
Las variables siguientes controlan los colores de la pantalla:
DefaultBackground
DefaultColor
TitleColor
BorderColor
MenuColor
DisplayColor
SelectColor
CurrentColor
SelectBackground
basándose en:
BLACK=0,Ambos
BLUE=1,Ambos
GREEN=2,Ambos
CYAN=3,Ambos
RED=4,Ambos
MAGENTA=5,Ambos
BROWN=6,Ambos
LIGHTGRAY=7,Ambos
DARKGRAY=8, sólo primer plano
LIGHTBLUE=9, sólo
primer plano
LIGHTGREEN=10, sólo primer plano
LIGHTCYAN=11, sólo
primer plano
LIGHTRED=12, sólo primer plano
LIGHTMAGENTA=13, sólo
primer plano
YELLOW=14, sólo primer plano
WHITE=15, sólo primer plano
BLINK=128, sólo primer plano
DisplayOpeningMsgs: si se asigna a cero los mensajes de entrada y salida desaparecen
MoveHsMsgDeg: longitud de desplazamiento permitida antes de mostrar un mensaje de confirmación
IACA_Flag: si 1, se usa IACA para comunicar con otros programas preparados para IACA
AltLowLimitDeg, AltHighLimitDeg, AzLowLimitDeg, AzHighLimitDeg: estos límites son activos sólo cuando HsTimerFlag tiene valor 1 (on); si HsTimerFlag está a on y se desea desactivar los límites de altizud, se debe asignar a los límites de altitud el valor 0; si HsTimerFlag está a on y se desea desactivar los límites de azimut, se debe asignar a ambos límites de azimut el valor 0
Siderostat: su valor debe ser 0 si se usa una montura altacimutal o una ecuatorial estándar, o 1 si se usa un siderostato o un plano de uranostato para enfocar la luz en un tubo de telescopio estacionario; se debe asignar a AzLowLimitDeg un valor cercano a 90, y a AzHighLimitDeg un valor cercano a 270, donde el sur esté alrededor de 180, la diferencia entre los límites debe ser de 180 grados o menor. Esto permite que la altitud exceda de 90 grados, de otro modo el espejo plano intentará dar la vuelta de arriba a abajo cuando se apunte a extremos cercanos al norte.
HomeAltDeg, HomeAzDeg: Estas son las coordenadas de aparcamiento del telescopio
MsArcsecSec: velocidad en micropasos cuando se usa el mando para centrar un objeto; puede cambiarse mientras el programa está ejecutando
BacklashMsArcsecSec: velocidad en micropasos para corrección de cambios de sentido, no puede cambiarse mientras el programa está ejecutando
AltFullStepSizeArcsec, AzFullStepSizeArcsec: estos son los tamaños de paso para los motores paso a paso de altitud y azumut. La altitud se mide por medio de un nivel de precisión; para ello se coloca el tubo horizontal, cambiando la altitud a 0, para, a continuación, mover el telescopio con los motores hasta que el nivel de precisión indique que el tubo está exáctamente vertical. El cociente entre la altitud mostrada y 90 grados es el valor que debe introducir en el tamaño de paso. De forma similar, una vuelta completa en azimut puede usarse para ajustar el tamaño de paso en azimut.
RefractFlag: 1 si se desea usar la refracción atmosférica en los cálculos, 0 si sólo se desea que se muestre en la pantalla
FRStepSizeArcsec: tamaño de paso del motor de rotación de campo; poner a 0 si se desea desactivar la rotación de campo
AltBacklashArcmin, AzBacklashArcmin: correcciónes a efectuar en caso de cambios de sentido (si se dejan a 0 se desactiva la corrección de cambio de sentido)
GuideArcsecSec: velocidad de corrección de guiado, puede cambiarse mientras el programa está trabajando
FullstepsPerPECArray: esto permite la corrección de error periódico para montajes desde uno hasta cuatro sinfines asociando la secuencia de correcciones PEC a un conjunto de pasos completos, no a una única vuelta del motor. Valores positivos en el fichero PEC.DAT indican que se ha girado demasiado en el sentido de las agujas del reloj. Los valores se miden en centésimas de segundo de arco. Se usan un total de 200 valores por PEC. El PEC debe de sincronizarse colocando los ejes de los motores en una posición de arranque determinada y pulsando la opción "PEC on" del menú de selección del teclado.
InvertOutput: puesto que los inversores cambian los valores de salida del puerto paralelo, el valor debe ser 1, a no ser que se usen los opto-acopladores opcionales, en cuyo caso debe de asignarsele el valor 0: ¡si se confunde este valor se bombeará una gran cantidad de corriente por los motores paso a paso!
HsTimerFlag: asignar el valor 1 si se desea usar la interrupción IRQ 8 para temporizar los desplazamientos por medio paso, esto permite la actualización en tiempo real de las coordenadas del telescopio, la interrupción de los desplazamientos por teclado, y la comprobación del límite de altitud durante los desplazamientos; de otro modo, si se pone a cero, los medios pasos se temporizan con un bucle de retardo con las interrupciones inhabilitadas para evitar paradas; el uso de IRQ8 funciona perfectamente en DOS, no funciona de ningún modo en Win 3.x y funciona lentamente con Windows 95
MaxDelay, MinDelay, HsDelayX: estos valores asignan las velocidades más baja y alta de desplazamiento:
cuando se usa la temporización de medios pasos con IRQ 8, la rampa de velocidad comienza a (MaxDelay - MinDelay) y alcanza un valor máximo dado por MinDelay
cuando se usa el lazo de retardo para temporizar los medios pasos con las interrupciones inhabilitadas, la rampa de velocidad comienza a (MaxDelay - MinDelay)* HsDelayX y alcanza la máxima velocidad dada por MinDelay * HsDelayX, donde HsDelayX se usa como un factor de multiplicación para mantener los valores de MaxDelay y MinDelay a un tamaño razonable en CPUs rápidas
HsRampX: el tiempo que dura la rampa de subida o bajada de velocidad se multiplica por HsRampX
InterruptHs: número de medios pasos antes de que las interrupciones se inhabiliten si se está usando el lazo de retardo para temporizar los medios pasos
HoldReps: tiempo de bloqueo de los rotores al comienzo del desplazamiento para prevenir la oscilación del eje y evitar que se sobrepase la posición de equilibrio del bobinado
PWMRepsTick: número de modulaciones de anchura de pulso por pulso de reloj de la bios. Asignar al valor medio de PWMReps que se muestra en la pantalla.
MsDelayX: valor de repetición de cada valor en las matrices de micropasos, esto permite tener matrices más pequeñas cuando se necesitan grandes PWM[] para PCs rápidos.
MsPause: el número de bucles de tiempo muerto al final de cada bucle PWM[]. Esto permite una resolución fina a bajas tensiones cuando se usa una fuente de alimentación de alto voltaje
Ms: número de micropasos: dejarlo a 10
PWM[0] a PWM[9] : Estos valores asignan los voltajes para cada
micropaso individual. En general, estos valores deberían reflejar una curva
tipo seno/coseno. Si el movimiento por micropasos no es suave deben ajustarse
los valores. Si los motores se calientan demasiado y consumen mucha corriente,
bajar los valores de PWM[0] a PWM[9], reducir MsDelayX e incrementar MsPause.
El rotor se posiciona basándose en la fuerza inversamente proporcional al
cuadrado de dos bobinados adyacentes:
paso 0: PWM[0]
paso 1: PWM[1] y
PWM[9]
paso 2: PWM[2] y PWM[8]
paso 3: PWM[3] y PWM[7]
paso 4:
PWM[4] y PWM[6]
paso 5: PWM[5] y PWM[5]
paso 6: PWM[6] y PWM[4]
paso 7: PWM[7] y PWM[3]
paso 8: PWM[8] y PWM[2]
paso 9: PWM[9] y
PWM[1]
Estos valores deberían ser ajustados para minimizar el consumo de
corriente por los motores paso a paso durante el seguimiento. Cuando se hace
un seguimiento, los motores consumen aproximadamente 0,1 amp, generando un par
adecuado.
PPortAddr: dirección del puerto paralelo, la dirección base para el puerto lpt1 = decimal 888 (hex 378), para el puerto lpt2 = decimal 632 (hex 278), para la tarjeta de vídeo monocromo = decimal 956 (hex 3BC)
EncoderType: 0 = MGIII y otras cajas de codificadores, 1 = la caja de codificadores de Bob Segrest
EncoderComPort: com1 = 1, com2 = 2, asignar 0 si no se usan codificadores
AltEncoderCountsPerRev, AzEncoderCountsPerRev: número de pulsos del codificador por una vuelta completa de la montura del telescopio (su valor máximo es de 65,534)
AltEncoderDir, AzEncoderDir: permite cambiar la dirección en la que el codificador cuenta hacia arriba, asignar a 0 para invertir la dirección de contaje
EncoderErrorThresholdDeg: si las lecturas del codificador comparadas con las coordenadas actuales exceden este umbral, entonces las coordenadas actuales se cargan con las lecturas de los codificadores; si es cero las coordenadas no se recargan sin importar cuán grande sea la discrepancia
TrackEncoderErrorThresholdDeg: como el anterior, pero el umbral de error se usa cuando el seguimiento o el desplazamiento está activado
Z1Deg: desviación de la elevación respecto a la perpendicular al plano del horizonte
Z2Deg: error del eje óptico en el mismo plano
Z3Deg: corrección de la puesta a cero de la elevación
LongitudeDeg: la longitud del lugar de observación, se usa para determinar HAOffset
Tz: usado para determinar la hora sidérea, el proceso de iniciación de las dos estrellas no depende de la hora sidérea ni de la longitud, en su lugar se apoya completamente en el intervalo de tiempo entre iniciaciones
DST: también se usa para determinar la hora sidérea
TestCode:
0 = ejecución normal del programa,
1= prueba de
las rutinas del puerto serie,
2= prueba de las rutinas de los
codificadores,
3 = prueba de las rutinas de tiempo,
4 = prueba de las
rutinas de vídeo,
5 = prueba del puerto paralelo,
6 = prueba del
mando,
7 = prueba de las rutinas de conversión de coordenadas,
8 =
pone al programa en un modo de funcionamiento en el cual los motores realizan
el seguimiento o se mueven a una velocidad constante de "x" número de
micropasos por segundo, que se introduce bajo una solicitud en pantalla,
9
= prueba de las rutinas IACA
Este es el aspecto de la pantalla del programa... 
El mando:
El mando tiene cuatro pulsadores que mueven el telescopio en altura y azimut. Estos pulsadores están abiertos en reposo, sólo se cierran al ser pulsados y se abren de nuevo al dejarlos libres.
El conmutador central selecciona entre desplazamiento rápido por medios pasos y centrado suave y lento por micropasos.
El conmutador superior de tres posiciones selecciona diferentes acciones basadas en el estado actual del mando que almacena el programa. Este puede ser apagado, iniciación, guiado (Guide), guiado+grabación (Guide+Save), desplazamientos automáticos (Scroll Tour), gran gira (Grand Tour), grabación (Record).
Cuando la iniciación (Init) está activa, moviendo temporalmente el interruptor a la izquierda se selecciona la posición de inicio número 1 (Init 1), mientras a la derecha se selecciona la posición de inicio número 2 (Init 2).
En guiado (Guide), el movimiento del conmutador a la izquierda pone el mando en modo de guiado, en el que los pulsadores mueven el telescopio muy lentamente en ascensión recta y declinación. La velocidad la establece GuideArcsecSec en el archivo "config.dat". Cuando se está en el modo de guiado+grabación (Guide+Save), todas las correcciones son guardadas en el archivo "guide.dat".
Cuando se termina el modo de guiado mediante un desplazamiento del conmutador superior a la derecha y de nuevo rápidamente al centro, los valores de deriva son calculados y mostrados en base a las correcciones de guiado. Esto se usa para anular cualquier deriva residual temporal debida a imprecisiones en la inicialización de un montaje portátil o a imprecisiones en la construcción de la montura.
Cuando se está en modo de desplazamiento automático (Scroll Tour), si se lleva el conmutador de modo de funcionamiento a la izquierda, el telescopio es movido de forma continua a través del archivo de desplazamientos, en otro caso se salta a cada posición en el archivo de desplazamiento de forma manual.
En el modo gran gira (Grand Tour), el conmutador de modo mueve al siguiente o anterior objeto en el archivo de datos, dependiendo de si se lleva hacia la izquierda o la derecha.
En el modo grabación (Save), el conmutador de modo escribirá las coordenadas ecuatoriales actuales del telescopio en el archivo 'record.dat'.
Codificadores:
Si se usan codificadores y se apaga el seguimiento, el movimiento manual del telescopio resulta en valores cambiantes de los codificadores, que actualizarán la altura y azimut del telescopio. Cuando el seguimiento está activado, si la altura y azimut actual difiere de la indicada por los codificadores, se entiende que la situación es debida a un deslizamiento involuntario de los ejes de la transmisión, o quizá a un empujon del viento que desplaza el telescopio fuera de su posición. El telescopio regresará a la posición apropiada y continuará el seguimiento. Si los codificadores están funcionando no mueva a mano intencionalmente el telescopio cuando esté activado el seguimiento. Para ilustrar esto, he aquí un incidente que tuvo lugar en una reciente fiesta de las estrellas.
Greg Granville escribe: "El telescopio de 12,5" (32 cm.) está trabajando perfectamente con esta configuración. Recientemente he incorporado codificadores al telescopio. Hace unas semanas en una fiesta de las estrellas, un muchacho estaba subido unos pocos escalones de una escalera mirando a NGC 4565. Cuando bajaba de la escalera, accidentalmente empujó el telescopio e hizo que se moviera en azimut. ¡Pareció muy sorprendido cuando el telescopio respondió automáticamente regresando a la posición adecuada!"
Visualización de coordenadas en la pantalla:
Tres son las coordenadas principales mostradas en la pantalla: codificadores, actual y de entrada. Las coordenadas actuales muestran la posición actual del telescopio. Las coordenadas de los codificadores muestran la posición según es transmitida por los codificadores. Los campos de entrada muestran las coordenadas que se usarán si se seleccionan las opciones mover (Move) o ir a datos de entrada (Reset to Input) del menú. Al colocar estas coordenadas una encima de otra, puede hacerse una buena comparación del posicionamiento de los codificadores, el posicionamiento del programa, y el que supondrá un desplazamiento o una puesta a cero.
Teclas rápidas:
'`' (la tecla del apóstrofe izquierdo en la parte superior de la mayoría de
los teclados) selecciona el elemento del menú 'Guide.bat'
'1' selecciona
'ir a coordenadas ecuatoriales' (Move to Equat)
'2' selecciona
'activar o desactivar seguimiento' (Track On/Off)
'3' graba las
coordenadas ecuatoriales actuales
'4' lleva las coordenadas ecuatoriales
grabadas a los campos de entrada
'5' graba las coordenadas ecuatoriales
actuales como las número 2
'6' lleva las coordenadas ecuatoriales número 2
grabadas a los campos de entrada
'd' selecciona el elemento del menú
'fichero de datos'(Data File)
'g' selecciona el elemento del menú
'Guide.bat'
'h' selecciona el elemento del menú mando (HandPad),
pasando de un modo a otro del mando
'm' selecciona la velocidad de
micropaso (Ms Speed)
'p' selecciona PEC (corrección de error
periódico)
'q' sale del programa (Quit)
'r' recarga las
coordenadas ecuatoriales introducidas (Reset to Equat)
's'
selecciona el archivo de desplazamiento automático (Scroll)
't'
cambia el seguimiento de encendido a apagado y viceversa (Track On/Off)
Ajuste de los micropasos:
Establecer TestModule a 8 en el archivo config.dat, y elegir 1 micropaso por segundo. Poner un trozo de cinta adhesiva en el eje del motor y mirar cuidadosamente el espaciado de los micropasos. Si los pasos están muy separados, acercar los voltajes. Por ejemplo, si el espacio entre el micropaso número 0 y el 1 es demasiado grande, bajar PWM[9], si al motor parece que le cuesta moverse entre el micropaso 0 y el 1, incrementar PWM[9]. De nuevo, si el espaciado entre 3 y 4 es muy grande, incrementar 3, o decrementar 4, o una combinación de las dos cosas.
Esta es la secuencia de arranque:
Colocar el tubo del telescopio horizontal con respecto a la montura. Use un
nivel de burbuja de precisión para encontrar una dirección de azimut en la que
la base esté nivelada y mover el tubo para que apunte en la misma dirección y
esté nivelado.
Seleccionar la introducción de coordenadas altacimutales
(Input Altaz), e introducir AZ = 0, ALT = 0 (simplemente puedes apretar
la tecla Intro dos veces). Si deseas empezar con el tubo vertical respecto del
eje de azimut, introduce AZ = 0 y ALT = 90.
Selecciona el mando
(HandPad) para activar la iniciación.
Escoge una estrella brillante
para la iniciación usando el fichero "bstars.dat".
Usa el mando para
desplazarte a la estrella elegida; si están instalados los codificadores
opcionales se puede mover el telescopio a mano. Centrar en el ocular, apretar
INICIO 1 (Init 1) en el mando.
Selecciona una segunda estrella
brillante para iniciación usando el archivo "bstars.dat".
Usa el mando
para desplazarte a una segunda estrella, o muévelo a mano si están instalados
los codificadores opcionales, pulsa INICIO 2 (Init 2) en el mando.
Selecciona "Mando" (HandPad) hasta que Inicializar esté
desactivado.
Para desplazarse:
Selecciona "Seguimiento" (Track) para activarlo.
Selecciona
nuevas coordenadas usando uno de los archivos de datos, o llamando a Guide.bat
si está disponible, o introduciendo unas coordenadas ecuatoriales manualmente.
Elige "Ir a ecuatoriales introducidas" (Move to Input Equat) para
desplazarse al objeto.
Para mover el telescopio a mano:
Selecciona "Seguimiento" (Track) para desactivar el seguimiento (si
no lo haces, el telescopio intentará regresar a la posición original).
Si
están instalados los codificadores opcionales, el programa actualizará
automáticamente las coordenadas altacimutales (si el seguimiento está
desactivado, las coordenadas ecuatoriales también serán actualizadas), de otro
modo, si no están instalados los codificadores, después de mover el telescopio
será necesario introducir las coordenadas ecuatoriales del objeto al que te
has movido, y entonces seleccionar "Recargar las coordenadas ecuatoriales
introducidas" (Reset to Input Equat), de forma que el telescopio pueda
saber a donde apunta ahora.
Para mejorar la capacidad de búsqueda/seguimiento en las cercanías de la zona de observación del cielo:
Desplazarse a una estrella brillante conocida cerca del objeto.
Seleccionar las nuevas coordenadas usando uno de los ficheros de datos, o
usando Guide.bat si está disponible, o introduciendo unas coordenadas
ecuatoriales manualmente.
Elegir "Recargar a ecuatoriales introducidas"
(Reset to Input Equat) o, en su lugar, reinicia el valor inicial número
1 (Init 1) o el dos 2 (Init 2), lo que sea más apropiado).
Selecciona "Introducir ecuatoriales" (Input Equat) para introducir
las coordenadas del nuevo objeto a visualizar.
Elegir "Ir a ecuatoriales
introducidas" (Move to Input Equat) para desplazarse al objeto.
Este desplazamiento, si se hace cuidadosamente, será preciso al nivel del
segundo de arco.
Para usar Guide, un programa de planetario del Proyecto Plutón (Bill Gray):
Selecciona simplemente la opción 'guide.bat' del menú. Asegúrate de que el
programa 'wguide.exe' está en c:\guide.
Guide mostrará a donde está
apuntando el telescopio, y al salir de Guide, sus últimas coordenadas se
mostrarán en los campos de entrada de ecuatoriales (Input Equat).
(El programa de control del telescopio también puede ser usado desde
dentro de Guide: ejecute wguide versión 5.0+, y pulse Alt-J para activar los
motores del telescopio, entonces desde el menú principal seleccione ajustes
(Settings), control del telescopio (Scope Control), comandos
altacimutales (Altaz Commands), luego Mayús-f10, sistema de telescopio
número 3 (Scope System #3); luego vaya a través de los dos
procedimientos de alineamiento de estrellas usando Mayús-f5 después de
seleccionar una posición para iniciar, usando el programa de control del
telescopio para alinear el telescopio en la posición, luego saliendo de
regreso a Guide).
Estableciendo valores de error de retroceso (esta sección ha sido aportada por Jerry Pinter):
Asegurese de determinar con precisión (dentro del minuto de arco o menos) la cantidad exacta de error de retroceso en cada eje. Use un puntero láser unido al telescopio, proyectando un punto luminoso en una pared. Comience con ambos ajustes de error de retroceso (en config.dat) iguales a 0. Usando el mando, vaya en una dirección mediante micropasos por un tiempo, lo suficiente para asegurar la eliminación del error de retroceso, pare, y lea las coordenadas altacimutales en la pantalla. Entonces invierta la dirección del motor en el mando y pare justo cuando el telescopio comience a moverse. Lea la nuevas coordenadas altacimutales para determinar la cantidad de error de retroceso (en grados). Repita esto varias veces y use un valor promedio para cada eje. Convierta esto en minutos de arco e introdúzcalo en el archivo config.dat. Si no se tiene un puntero láser, se puede enfocar la cruz de un ocular reticulado en un objeto estacionario en el horizonte (una casa, un árbol, etc.) para determinar cuando comienza a moverse el telescopio. Los codificadores también pueden usarse si su precisión es suficiente. Después de entrar los parámetros de error de retroceso correctos dentro de config.dat, repita la prueba de retroceso usando el láser o los codificadores. El telescopio ahora debería eliminar el retroceso antes de desplazarse con micropasos, por ejemplo simplemente pulse rápidamente el pulsador del panel durante una fracción de segundo y se debería oír girar los motores, pero el telescopio no debería moverse mucho, y las coordenadas altacimutales tampoco. Esta es la clave de la compensación del retroceso: incluso aunque los motores giren rápido para eliminar el retroceso, el telescopio no se está moviendo y de ese modo las coordenadas altacimutales no deberían cambiar de valor. Sin la compensación del retroceso, antes de cada cambio en dirección para desplazamiento, micropasos, y seguimiento, los motores girarán un poco y el PC se creería que el telescopio se está moviendo (y por tanto cambiaría las coordenadas en la pantalla) sin embargo el telescopio no se está moviendo aún. Esto hace fallar la precisión de apuntado. El error de retroceso puede causar serios desplazamientos, errores de búsqueda y seguimiento, especialmente si supone una parte significativa del campo de visión.
Por ejemplo, el campo de visión de la mi cámara CCD Cookbook (la de Jerry Pinter) es de unos 15 minutos de arco en mi telescopio, y mi error de retroceso es de unos 7 minutos de arco. Así que si pienso que tengo un objeto casi centrado, sin compensar el error de retroceso estaría en realidad descentrado 7 minutos (dependiendo de en que sentido giraron los motores por última vez). ¡Puede estar fuera del borde del chip! Otro problema es que cuando se hace inicializaciones o se cargan las coordenadas de una estrella brillante cercana, si no se compensa el error de retroceso, entonces el telescopio puede fallar en el apuntado en la medida del valor del error de retroceso. Además, cuando se hace seguimiento de un objeto para tomar imágenes CCD, si no se compensa el error de retroceso, entonces el objeto derivará a lo largo del campo antes de que se tenga en cuenta el cambio de sentido. Con el error de retroceso compensado apropiadamente (como se describe más arriba), todo se tiene en cuenta automáticamente. El PC sabe exactamente a donde está apuntando el telescopio durante la iniciación, carga de valores, y desplazamientos. Cuando el telescopio se mueva hacia un objeto, éste entrará en el campo del chip CCD, y el seguimiento comenzará inmediatamente después de que los motores eliminen el retroceso, dejando el objeto en el mismo lugar dentro del campo de visión. Es importante tener el telescopio bien contrapesado (eje de altura) dado que cualquier desequilibrio tenderá a hacer aparecer el error de retroceso sólo en una dirección, con lo que dejará de servir la compensación del mismo.
Para usar las capacidades de deriva/guiado/PEC:
Después de la inicialización con dos estrellas, el seguimiento con altos aumentos mostrará normalmente dos errores residuales.
El primero es una deriva lenta y sostenida, habitualmente de un par de segundos de arco por minuto de tiempo. Es causada por pequeños errores de iniciación tales como no centrar con precisión la estrella en el retículo cuando se están iniciando las posiciones, y por errores de la montura como que los ejes de altura y azimut no sean exactamente perpendiculares.
El segundo es un error periódico causado por la transmisión, normalmente por un sinfín que no está bien centrado en su eje o no acomete el engranaje de forma correcta. Esto hace aparecer una lenta oscilación de la estrella adelante y atrás a lo largo del retículo.
El programa tiene capacidad para cancelar tanto el error periódico como el de deriva.
El fichero de PEC, o corrección de error periódico, está compuesto por dos columnas. La primera es un contador, de 0 a 199, que actúa como índice. Éste es el número de pasos en que está dividido el PEC. Normalmente se extiende a lo largo de una rotación individual del motor o 200 pasos completos, pero puede extenderse sobre cualquier número de pasos completos. Por ejemplo, extendiendo el PEC sobre 400 pasos completos cubrirá el PEC causado por un sinfín de doble giro. Establezca el número de pasos completos que cubrirá el ciclo de PEC con la variable FullstepsPerPECArray. Marque un punto de sincronización en el eje del motor o del sinfín que indique el punto inicial, correspondiente a un índice de 0. Después de los números de índice en el fichero PEC.DAT hay otros que indican la cantidad de PEC en décimas de segundo de arco para aplicar a cada índice. Por ejemplo, si una vuelta del sinfín causa un error periódico de 2,3 segundos de arco con el eje del motor a un ángulo de 45 grados, entonces el índice 50 debería tener un valor de 23 (asumiendo 200 pasos completos por revolución). Mire en el fichero PEC.TXT para ver como introducir estos valores. El PEC en altitud viene primero y luego el del azimut, ambos con índices de 0-199.
Estas son unas notas adicionales sobre el PEC por Chuck Shaw: Soy Chuck
Shaw. Recientemente he terminado de convertir mi Dobson de 14,5" (37 cm.) f/5
en un sistema altacimutal usando el proyecto y programas de Mel. ¡¡Estoy de
acuerdo en que esto es MUCHO más un "sistema" de lo que nunca imaginé!!
Yo
también lo he pasado mal cuando llegó el momento de anular el error periódico
y tengo unas cuantas "lecciones aprendidas" que pueden serte de utilidad....
1. Usar MUCHOS aumentos cuando se relice el guiado para construir el
fichero Guide.dat. Yo usé dos barlows una dentro de otra (una de 1,7x y otra
de 2,8x y un retículo iluminado de 12mm y un telescopio de ~1808mm dan unos
720x... usa POR LO MENOS tanto como eso si puedes... (¡¡en cual quier caso es
más facial guiar con borrones ligeramente desenfocados que con puntos!!)...
ESTAS usando un retículo EP iluminado, ¿¿¿no es verdad??? No intentes mantener
enfocada una imagen de la estrella en el centro de la caja. O bien desenfocas
un poco la estrella hasta que llene la caja, o la pones en el centro de una
intersección de dos líneas, o ponla en una "esquina" donde toque justo dos
líneas. Prueba diferentes técnicas para ver que te va mejor. ¡¡¡¡¡¡Yo encontré
que la mayor fuente de inconsistencias en mi juego de datos era YO y mi pobre
guiado!!!!!! Mis tiempos de reacción normalmente llegaban tarde y en la
dirección equivocada..... (duh......) :-) Juega con la orientación del mando
también para ver si es más fácil un guiado tipo "volar a"...
2. Usa la
rutina de guiado varias veces para fijar la deriva tanto como sea posible
ANTES de intentar escribir un fichero de captura de los datos PEC.
3. Para
recoger datos de Azimut, asegúrate y apunta el telescopio al sur, cerca del
ecuador celeste. Esto minimizará el movimiento en altura, y maximizará el
movimiento en Azimut....
4. Abre una sesión de DOS sin parar el
seguimiento después de realizar un guiado, Haz un "copy c:\guide.dat
PE-AZ1.txt", y luego un "copy c:\PEC.txt guide.dat" (contesta SI a la
sobreescritura), entonces pulsa salir y SHAZAM el telescopio se desplazará de
regreso a la estrella que estabas guiando y ¡¡¡¡¡estás listo para la siguiente
sesión!!!!! Nombra el siguiente fichero PE-AZ2.txt, etc...... Esto te
permitirá capturar varias sesiones muy rápidamente, y cualquier cambio de
configuración del sistema entre sesiones quedará minimizado.
5.
Inspecciona MUY DETALLADAMENTE cualquier "bamboleo" en los casquillos de tu
sinfín. Yo uso reductores 359:1 de Byers. Tuve que hacer los casquillos para
los sinfines y descubrí que el casquillo tenía un poco más de holgura de lo
que debería (el espacio libre es de 0,001 y Byers me dijo que debería ser de
cerca de 0,00005). Decidí fabricar un "hombro" a partir de un pequeño ángulo
de aluminio y un tornillo de bronce mecanizado. Afilé un punto al final del
tornillo mecanizado y este pasa a través del ángulo, y presiona en un hoyuelo
central al final del sinfín. Esto produjo una GRAN diferencia a la hora de
obtener resultados repetibles. Pienso que el problema era que el bamboleo del
sinfín era un poco aleatorio. Eso, por contra cambia el engranado ligeramente,
e induce error periódico.... Si tu sinfín está en un eje con
cojinetes/casquillos en ambos extremos, ¡también necesitas fijarte en ello!
6. Fíjate en los acoplamientos entre el motor y el sinfín. Si son
flexibles y estás usando los cojinetes del motor para estabilizar el sinfín
(si hay holgura en los casquillos éste es tu caso), necesitas un sistema de
acoplamiento de precisión. Yo compré varios comerciales ¡¡¡¡y encontré que
estaban ligeramente desajustados!!!! ¡¡¡Esto introduce error periódico de por
si!!! Esto, sin embargo, es CORRECTO, dado que el programa lo compensará.
7. Reinicializa la posición motor/sinfín entre cada sesión para estar MUY
seguro de que sabes que posición corresponde a la posición 0 en los datos del
guide.dat. Yo fallé haciendo esto unas cuantas veces y conseguí curvas
precisas pero torcidas..... ¡¡¡¡¡¡Debes recordar desconectar el PEC y entonces
volverlo a conectar después de que los ejes se posicionen !!!!!!
8.
Recuerda que la toma de datos NO empezará en cero a menos que lo planees de
esa forma. No seas optimista y cronometra, simplemente hazlo y usa tu programa
de hoja de cálculo para cortar las cuatro series de datos en columnas
separadas y moverlas arriba y abajo en la hoja para alinear los pasos en cada
serie. Entonces borra las columnas de número de pasos (todas menos la de más a
la izquierda). Haz un gráfico de las cuatro curvas y desecha cualquier cosa
que sea un error obvio de guiado. Entonces promedia el resto y ¡¡¡ya lo
tienes!!!
9. Recuerda que después de que los datos se copien a un fichero
llamado PEC.dat debes reinicializar los ejes a su posición cero. ¡¡¡¡Yo
todavía me sigo olvidando de hacerlo!!!! El sistema también parece quedarse
perdido después de un par de horas de operación.... Una reinicialización
ocasional de la alineación del PEC toma menos de 15 segundos y ayuda a
"aclarar" las cosas. No debería tener que hacerlo pero......
Tengo los
conjuntos de curvas de los datos que he tomado y puedo mandártelas. Estaba
teniendo las inconsistencias en la toma de datos inicial, y entonces la fase
se torcía hasta que estabilizaba también los sinfines.... te deja perplejo,
pero ¡¡¡un trabajo metódico sobre cada fuente potencial de error periódico
encontrará el culpable!!!
El rendimiento del sistema es sencillamente
asombroso cuando todo está completado..... Estoy de acuerdo con Mel en que los
errores de temporización del programa son los que tienen la menor probabilidad
de ser culpables. ¡¡¡¡¡Demasiadas veces quise culpar al programa de los
problemas pero Mel ha hecho sencillamente demasiado bien su trabajo!!!!!
¡¡¡¡La culpa fue SIEMPRE de algo que hice yo!!!! (¿¿¡¡no lo odias cuando te
pasa!!??) :-)
Para anular la deriva residual y opcionalmente escribir GUIDE.DAT, sigue el siguiente procedimiento.
Como patrón de copia, se incluye un fichero PEC vacío con valores 0, llamado PEC.TXT, se encuentra en el fichero scope.zip. Renómbralo como PEC.DAT si deseas usarlo. Activa el PEC después de sincronizar los ejes de salida de ambos motores a un ángulo determinado. Activa el seguimiento, fija la función del mando en 'guiado' (Guide), ajusta el interruptor de velocidad a micropasos, y cuando la estrella de guiado esté centrada en el retículo, lleva el conmutador de modo momentáneamente a la izquierda, activando el guiado. El telescopio se moverá ahora a la velocidad GuideMs, una pequeña variación que se añade o disminuye a la velocidad de seguimiento. Usando los pulsadores de dirección del mando, mantén la estrella de guiado centrada en el retículo. Pronto se oirán unos pitidos, que son los puntos de sincronización de los ciclos PEC, el pitido de altura tiene un tono más alto que el de azimut. Lleva el conmutador de modo momentáneamente a la derecha para terminar el guiado después de oír al menos dos pitidos de cada eje. Se escribirá un fichero GUIDE.DAT con índices PEC y los valores de guiado resultantes de las entradas desde el mando. Esto puede usarse para crear un fichero PEC.DAT real. Carga el fichero GUIDE.DAT en una hoja de cálculo, y dibuja una curva. Puede volcar varios ficheros GUIDE.DAT en la gráfica para obtener un valor de PEC promedio. Promedia los valores y colócalos en el fichero PEC.DAT.
Independientemente de si existe el fichero PEC.DAT, o de si está activo el PEC, los valores de deriva se calculan en el momento, se muestran en la pantalla, y se adoptan inmediatamente para la función de seguimiento.
Si sólo se desea hacer cálculos de deriva, centra la estrella en el retículo, inicia el modo de guiado desplazando momentáneamente el conmutador del mando a la izquierda, haz guiado durante un minuto o dos y luego finaliza el modo de guiado llevando el conmutador del mando a la derecha.
Si se desea, la anulación de la deriva puede realizarse de nuevo, encima de los últimos valores de anulación de deriva para refinarla aún más. Normalmente es suficiente con hacer el proceso una vez mientras que el telescopio no se desplace a una posición del cielo completamente distinta. Después de moverse a una nueva parte del cielo, repetir el proceso de anulación de deriva una vez que se hayan puesto a cero los valores de deriva a través del menú.
Desplazamientos automatizados (Scroll)
Asignando desde el mando el modo de desplazamiento automático, y seleccionando un fichero de desplazamientos, el programa está preparado para iniciar una serie de desplazamientos suaves, o 'sobrevuelos'. El movimiento es suavizado por micropasos. Empujando el conmutador de modo a la izquierda y volviendo al centro, el telescopio se desplazará hacia la siguiente posición en el fichero *.scr, empleando el número de segundos registrado en el mismo. Si se mantiene el conmutador en la posición izquierda, el telescopio se ira desplazando automáticamente de una posición a otra. Este modo es el mejor para explorar objetos o campos extensos tales como el Bucle de Cygnus o la Galaxia de Andrómeda.
Este es el formato de un movimiento a una coordenada ecuatorial absoluta:
a 23 0 0 15 10 0 10 aquí se puede poner un comentario
la 'a' indica posicionamiento absoluto, el telescopio se desplazará suavemente a 23:0:0, +15:0:0 a lo largo de 10 segundos. Para las posiciones absolutas, el telescopio debe estar suficientemente cerca para que pueda llegar mediante micropasos a la posición en el tiempo indicado.
Este es el formato de un movimiento por coordenadas ecuatoriales diferenciales:
o 0 0 0 0 10 0 5 aquí se puede poner un comentario
la 'o' significa coordenadas diferenciales, es decir, la diferencia de posición se sumará a la posición actual del telescopio para llegar al nuevo destino, en este caso 0:0:0, +0:10:0, o se añadirán 10 minutos de arco en declinación a la posición actual, así que empleando 5 segundos, el telescopio se desplazará hacia el norte 10 minutos de arco.
Gran Gira (Grand Tour)
Poniendo el mando en modo gran gira, y cargando un fichero de datos, se
puede ordenar al telescopio moverse de un objeto a otro en el fichero de
datos, simplemente moviendo el conmutador de modo del mando a la izquierda.
Esto es útil para sesiones de observación planificadas, y para secuencias de
campos de objetos tales como cúmulos de galaxias. Llevando el conmutador de
modo a la derecha, el telescopio regresará al objeto anterior.
Varias personas me han animado a mantener un un registro de versiones del programa y errores corregidos. Así que, como resolución de Año Nuevo para 1997, ¡finalmente lo he comenzado!
Construye Tus Propios Sistemas de Bajo Coste de Adquisición y
Visualización de Datos por Johnson, editorial Tab
Control de
Telescopios mediante Microordenadores por Trueblood y Genet, editorial
Willman-Bell
Varios amigos han aportado una gran contribución al proyecto.
Jack Brindle y un pequeño grupo están trabajando activamente en un puerto
Mackintosh basado por encima en el proyecto de Dobson computerizado.
Tom
Cathey trabajó conmigo en los codificadores.
Dale Eason contribuyó con
rutinas de rápidas de vídeo y desplazamiento cronometrado con interrupciones,
además de los ficheros de datos de Messier y de las estrellas hasta magnitud
5.
Bill Gray cooperó activamente conmigo para integrar "Guide" con
scope.exe.
Berthold Hamburger diseñó un PCB.
Jerry Pinter contribuyó
con varios de los ficheros de datos de objetos y trabajó conmigo en el
desarrollo de las rutinas de corrección del retroceso.
David Lane me ayudó
a integrar su proyecto de codificadores MGIII con mi sistema.
Bob Segrest
desarrolló un interfaz para codificadores de gran velocidad basada en un
microprocesador.
Chuck Shaw ayudó desarrollando el sistema de
contra-rotación y ha trabajado desarrollando un juego de instrucciones de
configuración.
Pat Sweeney está desarrollando una placa de impreso para el
proyecto.
Muchos otros aficionados han aportado sus
sugerencias.
Sientete libre de hacerme cualquier pregunta. Para el código, envía por favor un sobre con un disco SASE. A lo largo de mis 25 años de astrónomo aficionado he recibido la ayuda de varios expertos en la construcción de telescopios de aficionado que generosamente me han regalado su tiempo y el conocimiento que ganaron con mucho esfuerzo. Con el mismo espíritu, ofrezco la información de este proyecto para su libre distribución; los usos comerciales del código o de los diagramas del circuito están prohibidos.
*** FIN DEL DOCUMENTO ***
Visitada veces desde 4-11-2002
/Netscape/Users/filnet/pagina/trozos/alfress.jpg){kind=link}